01
優れた群制御
複数の障害物センサー、トポロジカルマッピングによる柔軟なレイアウトに対応。 ワンフロア複数のAGVを同時に動かすことが可能で、走行ルートの生成とリルートなどを自動的に行い、お互いが緩衝せず効率的に稼働。
総合セキュリティシステムの株式会社セキュリティデザイン/Security Design

![]()
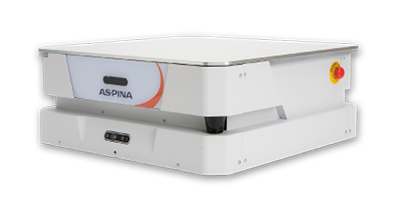
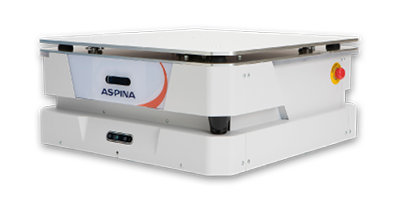
AGV/AMR






AGVが自動製品を搬送。従業員の負担を軽減。

トポロジカルマッピングによる柔軟なレイアウトに対応。

AGVの自動搬送により人が行う際に起こるミスを削減。
最適な搬送ルートをAIが構築し、物流工程に応じた搬送システムを導入。
大量のAGVを同時に稼働できるため、歩留まり低下も抑制。
![]()
複数の障害物センサー、トポロジカルマッピングによる柔軟なレイアウトに対応。 ワンフロア複数のAGVを同時に動かすことが可能で、走行ルートの生成とリルートなどを自動的に行い、お互いが緩衝せず効率的に稼働。
![]()
ホストの指示により動いている為、万が一AGVが故障してもすぐに新しいAGVに交換、稼動が可能。 RSCとの連携で搬送ロボットの稼働状況、位置情報などをリアルタイムに管理することが可能。
![]()
バッテリーの連続稼動時間は8時間。任意の電池残量閾値を設定することで、バッテリーが切れる前に、AGV自ら充電ステーションへ移動。 安定的な稼働を実現し、歩留まり低下を抑制。
ハード・ソフトともにフルカスタマイズが可能。
導入時だけではなく、導入後の保守・メンテナンスもしっかりサポート。
![]()
研究、開発、設計、メンテナンスを手掛ける国産メーカー。 安全基準を徹底した国内専用設計で粉塵・湿気などからの影響を抑えた仕様。
![]()
高い停止精度でコンベヤなど他設備との連携にも最適。 棚搬送以外にも構内物流としてパレット搬送や自動倉庫との連携でパレットを直接搬送するなど、柔軟な対応で工場の自動化を実現。
![]()
お客様の現場に合わせたハードカスタマイズ、PLC制御でのシャッター連携や自動倉庫連携など幅広いカスタマイズが可能。
| TiTra G 500 | TiTra G 1000 | |
|---|---|---|
| イメージ |
|
|
| 車体重量 | 245kg | 374kg |
| 車体寸法(㎜) | D950 × W720 × H290 mm | D1132 × W850 × H290 mm |
| 電源電圧 | リチウムイオン二次電池・51.2V・36.6A/h | リチウムイオン二次電池・52.8V・35A/h |
| 最大積載量 | 500kg | 1000kg |
| 操舵制御 | 二輪速度差制御 | |
| 走行機能 | 前進、スピンターン | |
| 走行速度 | 1.2 m/s | |
| 停止精度 | ±10㎜ | |
| 最小旋回半径 | 501 mm | 641 mm |
| 通信機能・充放電比率 | Wi-Fi無線通信・30分充電 3時間稼働 | |
| 充電方式 | 残容量検出による自動充電機能 | |
| 移載装置 | リフタ | |
小型で小回りの利く動き、ハードウェア・ソフト含めたオールインワン設計。
現場で作業者と一緒に働く、導入しやすい工場内搬送用のロボット。
![]()
標準パッケージに、操作が簡単なソフトウェアを標準搭載。誰でも容易に搬送の自動化を進めることができ、省人化の実現が可能。
![]()
重労働で手間のかかる搬送作業をAspinaAMRで自動化することで生産ラインの効率化を進めることが可能。 さらに、作業者の負担や疲労を軽減、工数の削減が期待でき、より付加価値を生む作業に従事が可能となる。
![]()
製造現場のレイアウト変更をすることなく、1台から導入できるため、搬送自動化をスモールスタートすることが可能。ロボット本体から制御ソフトウェアまで国内で開発・生産しているためお客様の搬送自動化を導入後まで手厚くサポート。
| AspinaAMR標準モデル | AspinaAMRリフトモデル | Aspina AMR300 | ||
|---|---|---|---|---|
| イメージ |
|
|
|
|
| 諸元 | 本体サイズ | W600 × D600 × H260 mm | W600 × D600 × H280 mm*1 | W600 × D800 × H380 mm |
| 最大速度 | 3.6 km/h | |||
| 走行性能 | 段差:5mm 角度:3° 溝幅:30mm*2 | |||
| 停止位置精度 | 標準位置:±50mm、 角度:±5° 誘導体によるアシスト有(オプション):±10mm、 角度:±2° |
|||
| 最大積載重量 | 100kg | 85kg | 300kg | |
| 電源 | バッテリー | リン酸鉄リチウムイオン電池 | ||
| 充電方式 | プラグイン充電または自動充電(オプション) | |||
| インターフェース | 無線LAN | 802.11a/b/g/n/ac | ||
| USB | Type-Aポート × 1 - QRコードリーダ等を接続可能 | |||
| 信号I/O | 入出力I/Oを各6チャンネル (AMRと外部機器との動作連携用) | 入出力I/Oを各8チャンネル | ||
| 音声 | 各動作報知用音声、メロディ |
障害物検知:
2か所(前後左右から視認可能) 報知器:スピーカー |
||
| 安全性 | 安全機能 | 非常停止ボタン及び各種センサによる近接/接触検知 | ||
| 安全規格 | JIS D6802に準拠予定 | |||
| その他 | その他機能 | 地図作成/障害物認識、回避/経路自動探索/自動ドア対応/地図上での障害物設定(侵入禁止エリアの設定)/停止位置やプログラム(ルート)の登録/QRコードによる指示/狭い通路設定/指定位置への呼び出し | ||
※1 リフトダウン時の寸法です。リフトアップ時はH330mmとなります。
※2 速度1.0 km/h以下条件で適用されます。
※3 全ての使用環境で保証される動作ではありません。
※4 仕様、特長および外観等は、性能向上、その他の理由で予告なく変更する場合があります。予めご了承ください。
※5 AspinaAMRはシナノケンシ株式会社または関連会社の登録商標です。
※6 QRコードは(株)デンソーウェーブの登録商標です。
協働搬送 (Follow-me) 、自律搬送、 協働+自律搬送、など
様々な組み合わせで搬送業務を効率化。
360° を含む複数センサ搭載、簡単すぐに使用可能。
![]()
段差など床面がフラットでない環境での使用が可能な4WD&大型タイヤ。「長距離 & 重量物搬送」を効率化
![]()
イメージ通りに前後に追従。
オペレーターは両手が使え搬送以外の付加価値の高い業務へ集中。牽引も可能。
![]()
床のガイドテープ等が不要で、ユーザー自身で自由自在に搬送ルート/運用ルールを設定可能。単独自律搬送~外部設備・上位システムとの連動等へフレキシブルな拡張性。

前後リバーシブル設計&どこからでも押せる非常停止ボタン

複数センサーで障害物やオペレーターを360°検知

ユーザーによるカスタマイズが可能な荷台構造

牽引治具アタッチメント(オプション)

リムーバブルリチウムイオンバッテリーを採用(予備用オプションあり)

自律走行によるトレーラー牽引
| 2輪駆動 | 4輪駆動 | |
|---|---|---|
| 車両本体サイズ | 1450 × 660 × 550 mm | |
| 車両重量 | 約140kg | |
| 最大積載量 | 200kg | 300kg |
| 最大牽引重量 | 200kg | 500kg |
| 停止位置精度 | -10℃~45℃ | |
| 最高速度 | 時速 6km/h | |
| 走行時間 | 6~8時間 | |
| 通信 | Wi-Fi | |
| ホイールスペース | 800 mm | |
| Uターン必要道幅 | 3,300 mm | |
| 最小回転半径 | 1,200 mm | |
プログラミング知識不要。即日導入が可能。
独自のAI技術により、人の往来を邪魔せず安全に搬送。
クリニック、飲食店、工場など、あらゆる現場の負担を軽減します。
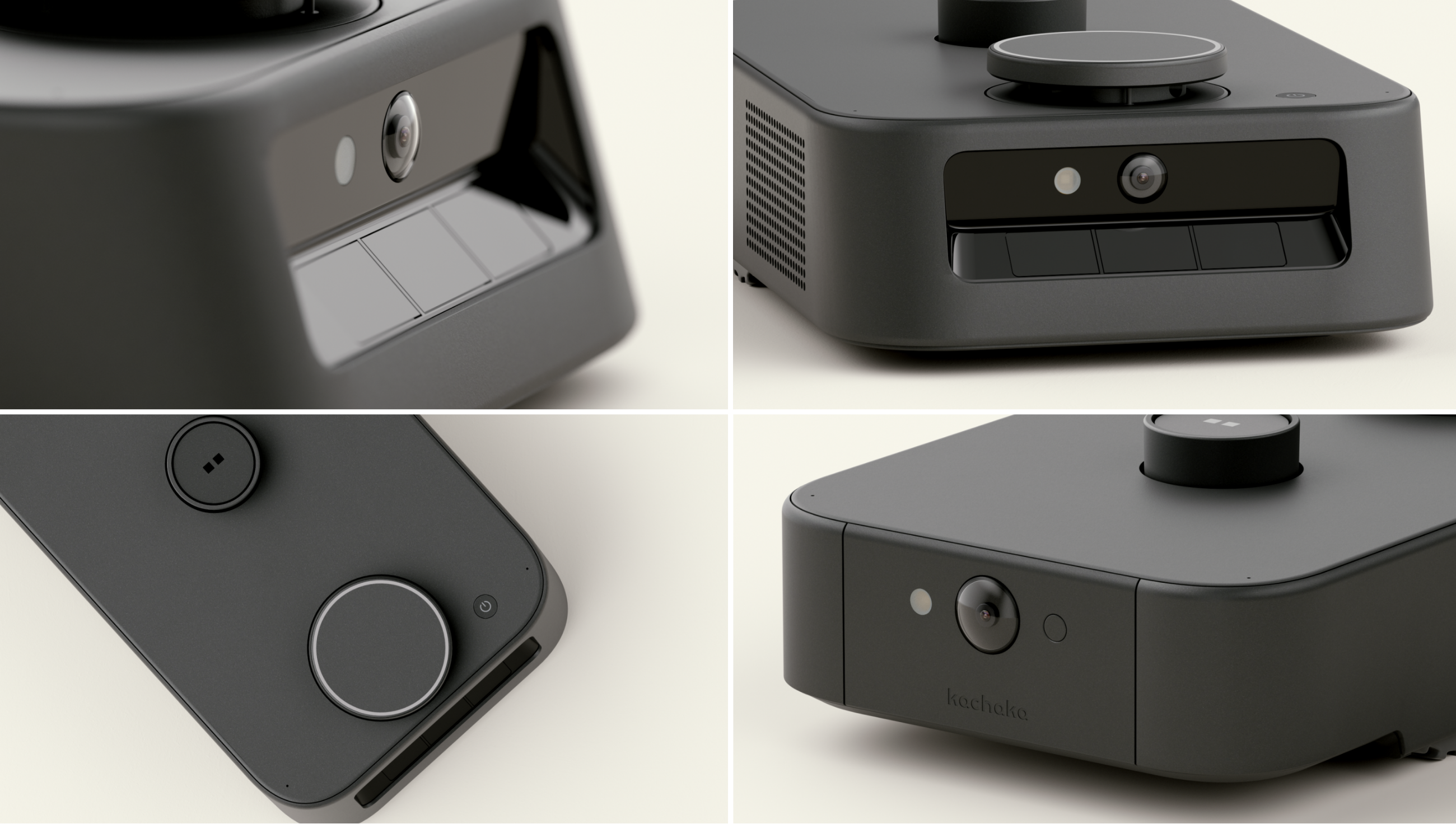
![]()
幅24cm、奥行38.7cmの小型ボディ。最小55cmの狭い通路もスムーズに走行可能です。既存のレイアウトを変更することなく、限られたスペースでの自動搬送を実現します。人の往来が激しい現場でも邪魔になりません。
![]()
磁気テープやマーカーの設置は一切不要。LiDARとカメラを組み合わせた最新のSLAM技術により、自己位置を正確に推定。AIが障害物をリアルタイムで検知・回避し、目的地までの最短ルートを自律的に判断して走行します。
![]()
専用のスマホ・タブレットアプリのガイドに従うだけで、マッピングから目的地設定まで誰でも簡単に行えます。オプションの「カチャカボタン」を使えば、PC操作なしでワンプッシュ搬送が可能。API公開により外部システム連携も容易です。

| カチャカプロ | |
|---|---|
| 本体サイズ | W240 × D387 × H124 mm |
| 本体重量 | 12.2kg |
| 最大速度 | 棚非牽引時 0.8 m/s (棚牽引時 0.5 m/s ) |
| 最大牽引重量 (棚重量含む) |
30kg(フローリング走行時),20kg(カーペット走行時) ※床材質等により変化 |
| 最小通路幅 | カチャカベース牽引時:550mm カチャカシェルフ牽引時:650mm |
| 走行性能 | 段差:5 mm 角度:2° ※使用環境や牽引重量等により変化 |
| 連続稼働時間 | 2時間~ |
| 充電時間 | 2時間~ |
| カメラ | RGBカメラ×2 |
| センサ | レーザーセンサ×1、3Dセンサ×1、 段差センサー×2、棚認識センサ×1 |
| サウンド | マイク×4、スピーカー×1 |
医療現場からスタートした高機能・高精度な高い信頼性を持つAMR。
多種多様な製品展開、高いカスタマイズ性により様々な現場で柔軟に対応。
![]()
RFID、パスワード管理、音声連動、タッチパネル操作など、多彩なインターフェースで対応可能。 エレベーター連携、自動ドア制御、複数台制御システムなど高度な連携も可能。
![]()
多様なオプション(呼出ボタン、非常停止ボタン、サービス電源搭載による各種機器運用など)により幅広い環境で使用される。 工場、病院、オフィス、ホテル、図書館などで活躍中。
![]()
高度なセンサー技術による安全な走行を実現。カメラやドライブレコーダーなどのカスタマイズでさらに安全機能を向上させることが可能。
| AMR50 | AMR100 | Nuta v2 | |
|---|---|---|---|
| イメージ |
|
|
|
| モデル名 | AMR50 | AMR100 | NUTAV2 |
| 本体サイズ | 41.9 × 40 × 22.3 cm | 57.9 × 55.4 × 26.6 cm | 50 × 50 × 125 cm |
| 重量 | 12kg | 35kg | 45kg |
| カラー | Black / White | White | Black / White |
| 積載重量 | 50kg | 100kg | 5kg(各コンテナ) |
| 走行速度 | 1.0 m/s forward | ||
| 走行精度 | ±8〜10 cm | ±3 cm | ±3 cm |
| 連続稼働時間 | 8〜13時間 | 8〜12時間 | 7〜9時間 |
| 充電時間 | 6時間 | 4〜5時間 | 4〜5時間 |
| 登坂能力 | 5% | ||
| 段差/溝幅 | 段差: 1.5cm / 溝幅: 3cm | ||
| センサー構成 |
2D Lidar ×1 Depth Camera ×2 超音波センサー ×7 |
2D Lidars x2 Depth Camera ×1 超音波センサー ×6 |
2D Lidars x4 Depth Camera ×1 超音波センサー ×6 |
| バッテリー | リチウムイオン電池 14.8V / 20.1Ah | リチウムイオン電池 25.2V / 20Ah | リチウムイオン電池 25.2V / 20Ah |
| 充電器 | 入力: 100–240VAC 50/60Hz 出力: 24VDC 4.2A |
入力: 100–240VAC 4.5A 50/60Hz 出力: 28.8 VDC 5A |
入力: 100-240VAC 4.5A 50/60Hz 出力: 28.8 VDC 5A |
| 通信 / I/O | Ethernet, 10Pin I/O, USB ×1, HDMI ×1 |
Ethernet, Power Output 5V/12V |
Bluetooth 4.0 Wi-Fi 802.11 a/b/g/n/ac |
| システム | Ubuntu+ROS | Ubuntu + ROS |
OS: Ubuntu+ROS, Android 11 CPU: ARM® Cortex®-A53 i.MX 8M Plus Quad RAM: 6G ROM: 16G |
| インターフェース | None | None |
ディスプレイ: Front/10.1 inch LCD Touch Screen Rear/8.8 inch LCD オーディオ: 5W Speaker x 2 カメラ: 5M Pixel ボタン: Power button x 1, Emergency button x 1 |
| LED | RGB LEDストリップ | ||
| 認証 |
Battery: UN38.3 Charger: BSMI, CE & UKCA, RoHS, TUV, UL Lidar: IEC 60825-1 CLASS 1 |
Battery: UN38.3, PSE, IEC62133 Charger: CE & UKCA, RoHS, TUV, RU Lidar: IEC 60825-1, CLASS 1 |
Battery: UN38.3, PSE, IEC62133 Charger: CE & UKCA, RoHS, TUV, RU Lidar: IEC 60825-1, CLASS 1 |

CONTACT